
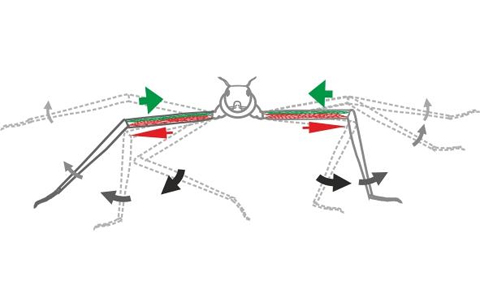
Stick insect stody. Credit: Arndt von Twickel et al.
“Long, heavy limbs such as arms or legs differ fundamentally from short, light limbs such as fingers in their ability to execute fast movements. While the central nervous system has to actively control fast movements of large limbs, passive muscle force can suffice for the movement velocity and movement amplitude of small and light limbs,” according to an article in Science Magazine.
That is the result of a study conducted on the stick insect by the zoologists Ansgar Bueschges, Arndt von Twickel and Christoph Guschlbauer at the University of Cologne in cooperation with the visiting scientist Dr. Scott Hooper, Professor of Biological Sciences at Ohio University.
The paper was published under the title “Swing Velocity Profiles of Small Limbs Can Arise from Transient Passive Torques of the Antagonist Muscle Alone” in Current Biology.
There are different basic speed levels in the course of a movement until the entire motor action has been optimally executed, says Bueschges. “If we look at the swinging of our legs when we walk, for example, the swinging phase brings the leg back into the starting position for the next step. With this feedback, the swing speed of the leg decreases towards the end, so that the foot does not touch down as quickly. Without the deceleration, the force generated when touching down would be so strong that it would counteract the next step.” Our nervous system produces this deceleration in large limbs such as the human leg.
For smaller limbs such as insect bones, however, the authors have shown that the slowing of the leg during rapid movements such as the swinging phase is independent of the central nervous system. Von Twickel explains that this is due to the intrinsic muscle characteristics of the limb. “If the extensor muscle of a leg joint is actively shortened to produce rapid movements, the inactive flexor muscle is necessarily lengthened. During this stretching, the flexor muscle develops a previously unknown dynamic passive force, which is so large that it can continuously slow down movements to the functionally necessary level.”
In the study, the authors exposed the flexor muscle of the stick insect leg to various stretching scenarios and measured the dynamic forces exerted by the passive muscle against the different stretches. Then, they used the results to dynamically simulate the functioning of a leg joint. The passive dynamic forces of the flexor generated by extensor activation were able to generate a movement that corresponded to the speed profile of an animal.
These results are quite surprising and contradict widespread notions of how small limbs execute fast movements. Bueschges concludes, “We have known for a long time that passive muscle forces are important for the movements of small limbs, but we did not expect that their effect is so great that they can determine the speed profile of a movement. This means that the active muscle and its opponent must be perfectly tuned to each other. We are in the process of better understanding this interaction.”
Abstract: In large limbs, changing motor neuron activity typically controls within-movement velocity. For example, sequential agonist-antagonist-agonist motor neuron firing typically underlies the slowing often present at the end of human reaches. In physiological movements of large limbs, antagonistic muscle passive torque is generally negligible. In small limbs, alternatively, passive torques can determine limb rest position, generate restoring movements to it, and decrease agonist-generated movement amplitude and velocity maxima. These observations suggest that, in small limbs, passive forces might also control velocity changes within movements. We investigated this issue in stick insect middle leg femur-tibia (FT) joint. During swing, the FT joint extensor muscle actively shortens and the flexor muscle passively lengthens. As in human reaching, after its initial acceleration, FT joint velocity continuously decreases. We measured flexor passive forces during imposed stretches spanning the ranges of FT joint angles, angular velocities, and movement amplitudes present in leg swings. The viscoelastic “transient” passive force that occurs during and soon after stretch depended on all three variables and could be tens of times larger than the “steady-state” passive force commonly measured long after stretch end. We combined these data, the flexor and extensor moment arms, and an existing extensor model to simulate FT joint swing. To measure only passive (flexor) muscle-dependent effects, we used constant extensor activations in these simulations. In simulations using data from ten flexor muscles, flexor passive torque could always produce swings with, after swing initiation, continuously decreasing velocities. Antagonist muscle passive torques alone can thus control within-movement velocity.

















Comments